
Rotorsteuergerät
| Rotorsteuerung | |
|---|---|
| Auf Grundlage vorhandener Komponenten wird eine Azimuth-/Elevations-Anlage für Sat-Tracking usw. aufgebaut | |
| Mitarbeiter | Stefan, DK3SB |
| Status | Abgeschlossen |
Bei Stefan lag schon seit längerem ein Azimuth-Rotor mit ausgeschlachtetem Steuergerät herum. Es sollte früher mal eine sehr aufwendige Steuerung dafür entstehen. Außerdem war auch ein funktionierender Elevationsrotor vorhanden. Nun sollten beide Komponenten fernsteuerbar gemacht werden, um dann in den produktiven Einsatz gehen zu können. Für den Azimuthrotor sollte gleich eine Anzeige/Steuereinheit entwickelt werden.
1. Azimuthrotor C-Rotor
Der Rotor ist unbekannten Fabrikates („C-Rotor“, vertrieben u.a. von Conrad) und hatte früher ein Steuergerät auf Grundlage zweier synchroner Motoren (einer im Rotor, einer im Steuergerät). Daher entfiel eine Positionsrückmeldung. Rolf, DL2ARH, befestigte innen ein 10-Gang-Potentiometer um die Position erfassen zu können und damit ein neues Steuergerät zu konstruieren. Die Features der Steuerung sollten sich auf Links-/Rechtsdrehen und eine Positionsanzeige beschränken. Der vorhandene Trafo (+-24V, mit Mittenanzapfung und Phasenschieberkondensator für den Motor) konnten weiterverwendet werden.
Eine interne Z-Diode stabilisiert die Spannung, ein Spannungshub von 2,86V mit einem Offset von etwa 6V stellt sich über den Drehwinkel von 360° ein.
Da die Steuerung per PC möglich sein soll, ist ein Ausgang der aufbereiteten Poti-Spannung und die Schaltkontakte für den Motor vorgesehen.

Die Elektronik beschränkt sich auf eine OPV-Schaltung, die als Impedanzwandler für das Poti und Subtrahierer einer einstellbaren Spannung wirkt. Damit kann der Offset vom 10Gang-Potentiometer-Spannungsteiler wegkalibriert werden. Die Endwertkalibrierung erfolgt über einen Serienwiderstand zum Zeigerinstrument. Ein Problem des Steuergerätes ist die Nichtlinearität des verwendeten Zeigerinstruments - ein Instrument mit Genauigkeitsklasse 1% oder besser sollte hier Verwendung finden.
Schaltplan und Layout
Der C-Rotor hat verschiedene Probleme, unter anderem leidet er unter recht großem Spiel, schlechter mechanischer Stabilität. Die Z-Dioden-Stabilisierung im Rotor steht weiterhin im Verdacht, eine Temperaturabhängigkeit zu besitzen und daher den Azimuthwinkel bei schwankender Temperatur zu verfälschen. Aus diesem Grund wurde ein bewährtes kommerzielles Modell angeschafft.
2. Azimuthrotor Kenpro KR-400
Der Kenpro KR-400 kommt häufig gemeinsam mit dem KR-500 zum Einsatz, wenn eine kombinierte Az/El-Anlage aufgebaut wird. Ein KR-400 wurde von eBay Kleinanzeigen erworben und soll den C-Rotor ersetzen. Einziger Nachteil hinsichtlich der Fernsteuerbarkeit ist die auf Norden zentrierte Anzeige, es ist keine mit dem K3NG-Rotor-Controller kompatible Lösung vorhanden, die Linux-Steuersoftware gut umsetzen kann.
Aus diesem Grund wurde analog der Idee von hier wurde eine auf Süden zentrierte Anzeige gebastelt und verbaut. Danach wurde die Fernsteuerbarkeit durch Einbau von Solid-State-Relais ermöglicht. Die eingebaute Leiterplatte entspricht der im KR-500, siehe unten.
{kind=link}
Die neue Skala gibt es als:
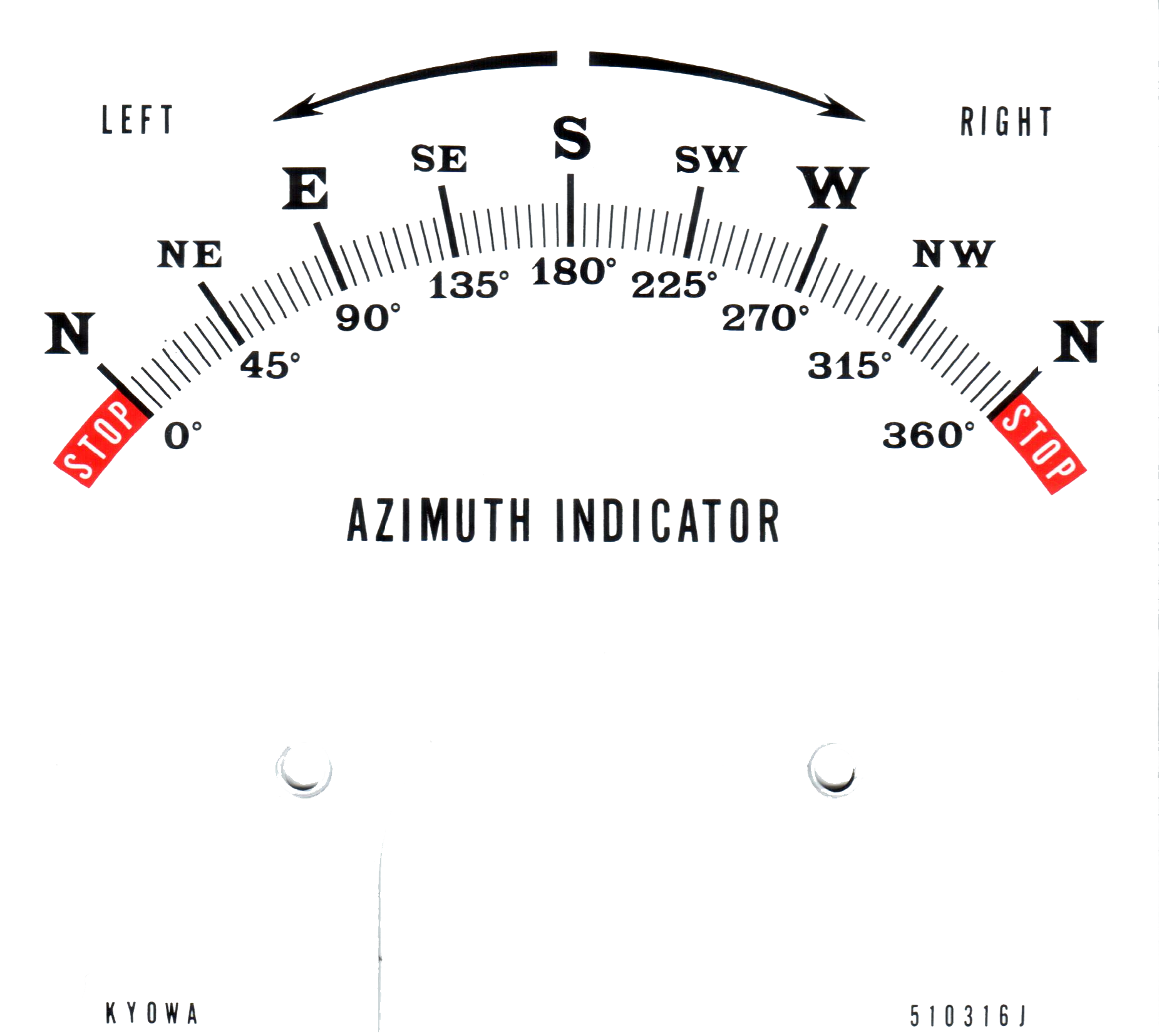{kind=link}
In den Bildern zu sehen sind die modifizierte Skala sowie die eingebaute Thyristor-Leiterplatte zur geräuschlosen Fernsteuerung.


Elevationsrotor
Der KR-500 war Funktionstüchgig, musste aber für eine Steuerung per PC noch modifiziert werden: Eine Buchse mit aufbereiteter Poti-Spannung sowie den Schaltkontakten wurde hinzugefügt. Die Opto/TRIAC-Schaltung aus dem Azimuthrotor wurde dafür wiederverwendet und ein kleines Zusatzmodul im Steuergerät installiert, die notwendigen Signale an einer zusätzlichen Buchse verfügbar gemacht.


Messung der Potispannung
Spannung zwischen Kontakt 1 und 3 beträgt 6,2V bei 0°, 6,13V bei 180° (Spannungsstabilisierung).
| Position | U2-3 |
|---|---|
| 0° | 0,05V |
| 22,5° | 0,704V |
| 45° | 1,423V |
| 67,5° | 2,15V |
| 90° | 2,87V |
| 112,5° | 3,6V |
| 135° | 4,3V |
| 157,5° | 5,02V |
| 180° | 5,73V |
Erwartungsgemäß linearer Zusammenhang (Poti an guter Spannungsstabilisierung) - die Ausgangsspannung muss auf 0..5V skaliert werden. Dies geschieht durch einen Spannungsteiler am Ausgang (direkt an der Buchse, realisiert mit 1kOhm und 5kOhm).
Schaltplan und Layout
PC-Steuerung
Die PC-Schnittstelle mit digitaler Anzeige gibt es bereits und wurde nach diesem Aufbau nachgebaut: http://blog.radioartisan.com/yaesu-rotator-computer-serial-interface/
Es wurde ein eigenes Layout dafür erstellt und gefertigt. Schaltplan und Layout sind hier verfügbar.
LCD und selbstgeätzte Leiterplatte wurden in ein Gehäuse von Reichelt verfrachtet und tun jetzt ihren Dienst als PC-Interface zur Rotorsteuerung!

Belegung des 5-Pin Diodensteckers entsprechend http://www.hobby-bastelecke.de/bilder/stecker/din1.gif
{kind=link}
| Pin | Funktion |
|---|---|
| 1 | GND |
| 2 | Opto V+ |
| 3 | Opto CCW/DOWN |
| 4 | VPot |
| 5 | Opto CW/UP |
Bedienungsanleitung
Die PC-Steuerung arbeitet mit einer Baudrate von 9600 Baud. Rotctld kann in Verbindung mit gpredict verwendet werden - folgende Befehlszeile funktioniert:
rotctld -m 603 -s 9600 -r /dev/ttyUSB0
In Gpredict wird ein neuer Rotor in den Einstellungen angelegt mit Standard-Port, und kann hinterher vom Antennen-Controller aus verwendet werden, wenn rotctld gestartet wurde. Das Azimuth-Steuergerät sollte nicht ohne angesteckten Rotor in Betrieb genommen werden, da fehlt vll noch ein Pull-Down. Außerdem ist es nach Verwendung vom Strom zu trennen (nur zur Sicherheit).
Kalibrierung
Die Kalibrierung erfolgt in drei Schritten: Zuerst werden der Azimuth- und der Elevations-Rotor einzeln auf ihre Drehbereiche kalibriert, zuletzt werden die Antennen korrekt befestigt.
Azimuth-Kalibrierung
Das Zeigerinstrument wird im ausgeschalteten Zustand auf minimalen Ausschlag (d.h. möglichst weit lihnks der Null) gebracht, indem die Justierschraube in der Frontplatte verdreht wird. Dies ist notwendig, um den Subtrahier-OPV möglichst weit entfernt von seinen Rails zu betreiben.
Zuerst muss jetzt der Drehbereich des Rotors korrekt eingestellt werden, dazu wird er manuell (d.h. über die CCW-Taste) bis fast an den linken Anschlag gefahren (Schwarze Markierungen auf dem Rotor stehen übereinander). Nun wird mit dem Offset-Poti (blau, auf der Leiterplatte) die 0°-Zeigerposition korrekt eingestellt. Jetzt mit der CW-Taste Richtung 360° fahren und anhalten, wenn die Markierungen wieder übereinanderstehen (Rotor darf noch nicht am Anschlag sein). Mithilfe des Serienpotis zur Anzeige wird nun der Maximalwert des Zeigerinstruments eingestellt. Diesen vorgang evtl. mehrfach wiederholen.
Abschließend einmal nach 0° und nach 360° fahren und die Kalibrierung der PC-Steuerung vornehmen (über die Befehle O und F (Offset, Fullscale)?, siehe Handbuch vom GS-232).
Wichtig: Das Zeigerinstrument hat eine Nichtlinearität, zeigt im Mittleren Bereich zu viel an. Ist nur Genauigkeitsklasse 2,5!
Elevations-Kalibrierung
Im Prinzip verläuft die Kalibrierung gleich: Der Rotor wird wechselseitig an die Anschläge gefahren und mit den Potentiometern (vorn Offset, hinten Gain) die korrekte Skalierung für das Poti eingestellt. Hinterher die PC-Steuerung mit den Befehlen O2 und F2 auch in dieser Achse kalibrieren.
Antennen-Einstellung
Dazu jetzt mit Hilfe der PC-Steuerung (Befehle für manuelle Steuerung per Terminal schicken, oder per Gpredict einstellen) den Rotor in eine bekannte Lage drehen (z.B. markanter Azimuth-Punkt, Elevation 0°) und dann Azimuth- und Elevations-Mast lockerschrauben, korrekt ausrichten und wieder festziehen. Eventuell kann es sinnvoll sein, 90° verdreht zu einer bekannten Position anzufahren und über den Elevations-Boom auf den bekannten Punkt zu peilen, während die Antenne dann in die richtige Richtung zeigt.