
Inhaltsverzeichnis
PLL-Ansatz für den Feldeinsatz
Für den 10 GHz-Transverter wurde die Stabilisierung mittels einer PLL aufgebaut. Als Vergleichsfrequenz finden hier verhältnismäßig hohe 10 kHz Verwendung. Der Timepulse-Ausgang des uBlox-GPS kann auf diese Frequenz programmiert werden. Die Verwendung analoger Schaltungstechnik für das Schleifenfilter begrenzt die sinnvoll realisierbare Schleifenfilterbandbreite.
Die Hardware/Software-Unterlagen sind hier zu finden:
- Errata für v2: GPS RX an P1.1 routen, 32kHz-Quarz hinzufügen
- Sourcecode (MSP430 C-Code mit Makefile): ZIP
TODO aktualisieren der Schaltpläne
Nach Umsetzung der notwendigen Software konnte die PLL erfolgreich in Betrieb genommen werden. An Stefans Trimble-OCXO stellt sich mit GPS-Fix eine Abstimmspannung von 2,4V am OCXO ein.
Probleme
Mit Version 1 der Hardware traten verschiedene kleine Probleme auf, die auf dem Prototypen isoliert und behoben werden konnten.
Schleifenfilter: Der Abstimmeingang des OCXO besitzt einen Eingangswiderstand um die 400 kOhm. Aus diesem Grund kann das Schleifenfilter keine hochohmigen Serienwiderstände enthalten. Entweder sollte ein niederohmiges Schleifenfilter verwendet werden (was die Grenzfrequenz beschränkt) oder ein aktives Schleifenfilter implementiert werden.
Lock Detect: Das Digital Lock Detect (DLD) der 10 MHz-Schleife funktioniert in diesem Aufbau nicht. Ursache hierfür ist der Leckstrom in den Abstimmpin des OCXO. Der Eingangswiderstand dort wurde zu etwa 400kOhm ermittelt. An 3 V ergibt sich so ein Leckstrom von $I_l = 8 \mu A$. Zusammen mit dem Ladepumpenstrom von $I_p = 5 mA$ und der Phasenvergleicherfrequenz von 10 kHz ergibt sich eine statische Phasenverschiebung von:
$Phase Error = \frac{I_l}{I_p} \cdot t_{PFD} = \frac{8 \mu A}{5 mA} \cdot 100 \mu s = 160 ns$
Auch wenn diese statisch und damit prinzipiell unproblematisch ist, liegt sie deutlich über der 15ns-Grenze, die für die Digital Lock Detect-Funktionalität detektiert wird. In AN-873 werden die Zusammenhänge erklärt. Statt des DLD wird daher im Prototyp der 10kHz-Ausgang nur eingeschaltet, wenn ein GPS-Fix vorhanden ist. Das Vorhandensein der Frequenz kann dann als Lock-Indikator verwendet werden, auch wenn nicht direkt das Einrasten der Regelschleife angezeigt wird.
Ergebnisse
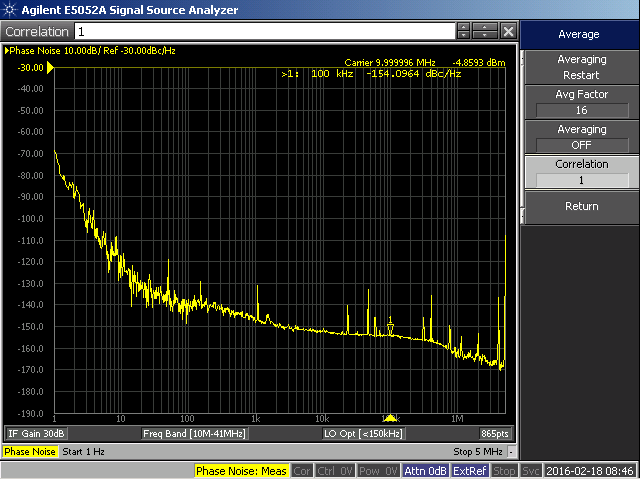
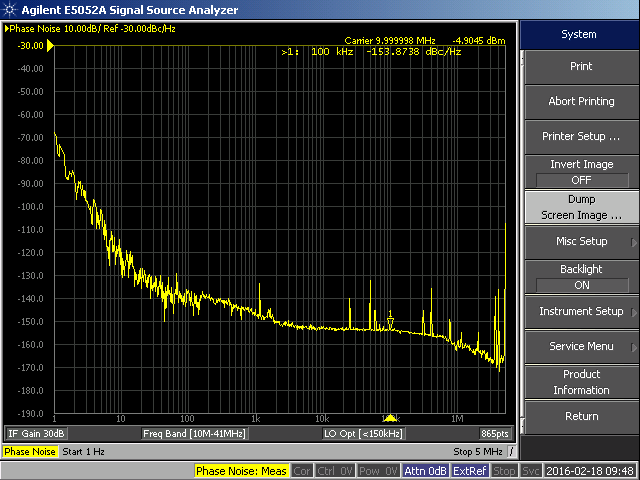
Ein Prototyp konnte für den 10 GHz-Transverter aufgebaut werden. Nachdem das GPS einen Fix hat, regelt sich die OCXO-Abstimmspannung auf etwa 2,5 V ein. Die Phasenrauschmessungen mussten im Labor mangels GPS-Empfang mit einem Signalgenerator als 10kHz-Quelle durchgeführt werden.
- Phasenrauschen 10 MHz
{kind=link}
{kind=link}
{kind=link}
Gezeigt haben sich in der praktischen Anwendung vor allem zwei Effekte: Einerseits ist die Zeitkonstante der Taktnachregelung im GPS selbst sehr hoch, d.h. die 10 kHz aus dem GPS werden langsam nachgeregelt, es dauert bis zu einer Minute bis man auf der Endfrequenz angekommen ist. Andererseits ist die thermische Stabilität des GPS-Moduls um Größenordnungen schlechter als die des Ofens. Da dieses jedoch als Referenz dient schlagen sich thermische Frequenzänderungen direkt auf die Ausgangsfrequenz durch. Dem könnte man durch eine niedrige Grenzfrequenz des Schleifenfilters abhelfen, allerdings ist diese sowohl durch den praktischen Einsatzfall (Einrasten innerhalb weniger Minuten nach Fix) als auch durch das verwendete passive Filter begrenzt.
Um die Kurzzeitstabilität (und damit im weiteren Sinne die Genauigkeit) überhaupt sinnvoll verbessern zu können, muss das GPS-Modul thermisch von jeder Art schneller Temperaturänderungen isoliert werden.
Ein verbessertes Konzept für einen GPSDO sollte vorsehen, die 10 MHz aus dem OCXO direkt als Systemtakt für das GPS zu verwenden und diesen selbst nachzuführen. Damit wäre die schlechte thermische Stabilität des TCXO im GPS-Empfänger kein Problem mehr.